这篇文章主要是个人的学习经验,想分享出来供大家提供思路,如果其中有不足之处请批评指正哈。
废话不多说直接开始主题,本人是基于STM32F407VET6芯片,但是意在你看懂这篇文章后,不管是F1,F4,H7等一系列系统定时器PWM配置都能明白如何通过参考手册去学习配置。而不是Ctrl c,Ctrl v。这篇文章大致的简述一下定时器1控制舵机基于STM32F407VET6,cubemx定时器PWM驱动舵机
1. 什么是舵机:

在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。
2. 其工作原理是:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就像我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
3. 舵机的控制:
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
频率=1s/20ms=50HZ
CUBEMX配置
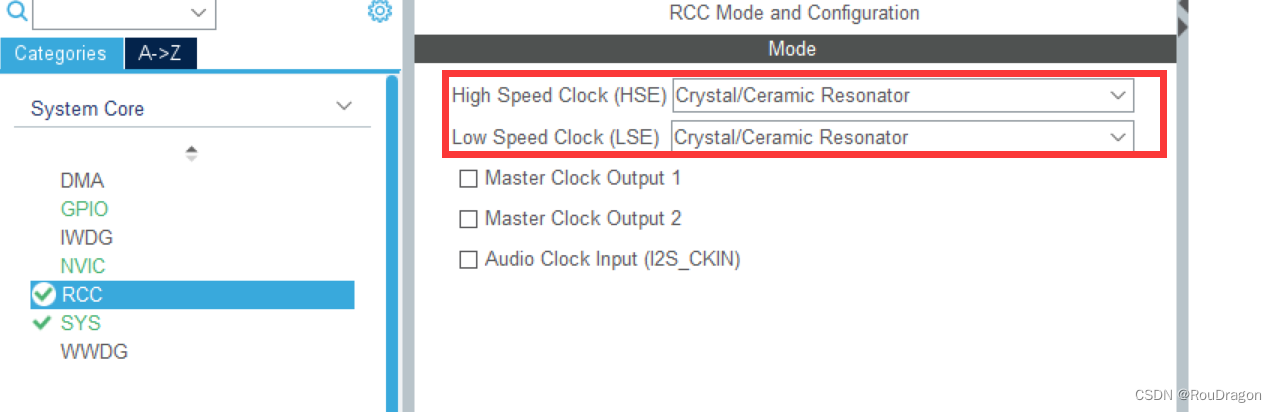
1.电路使用外部晶振
2.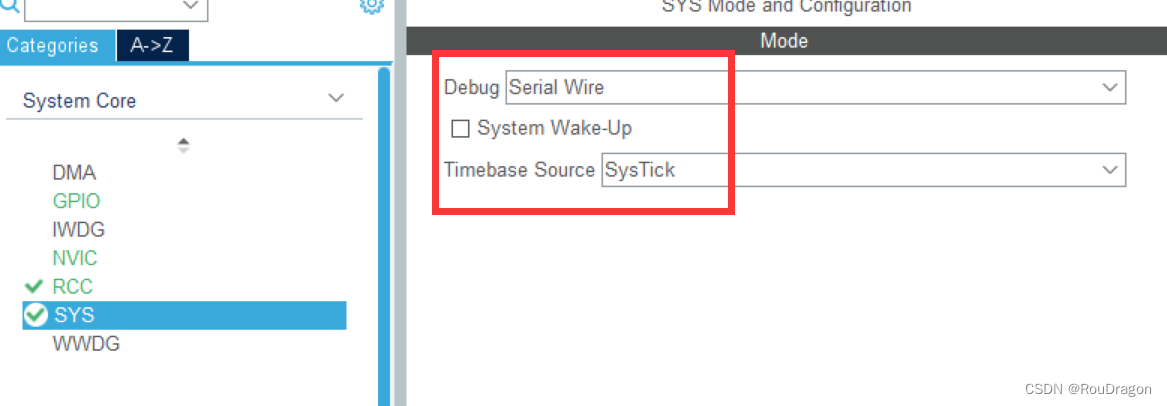 3.
3.
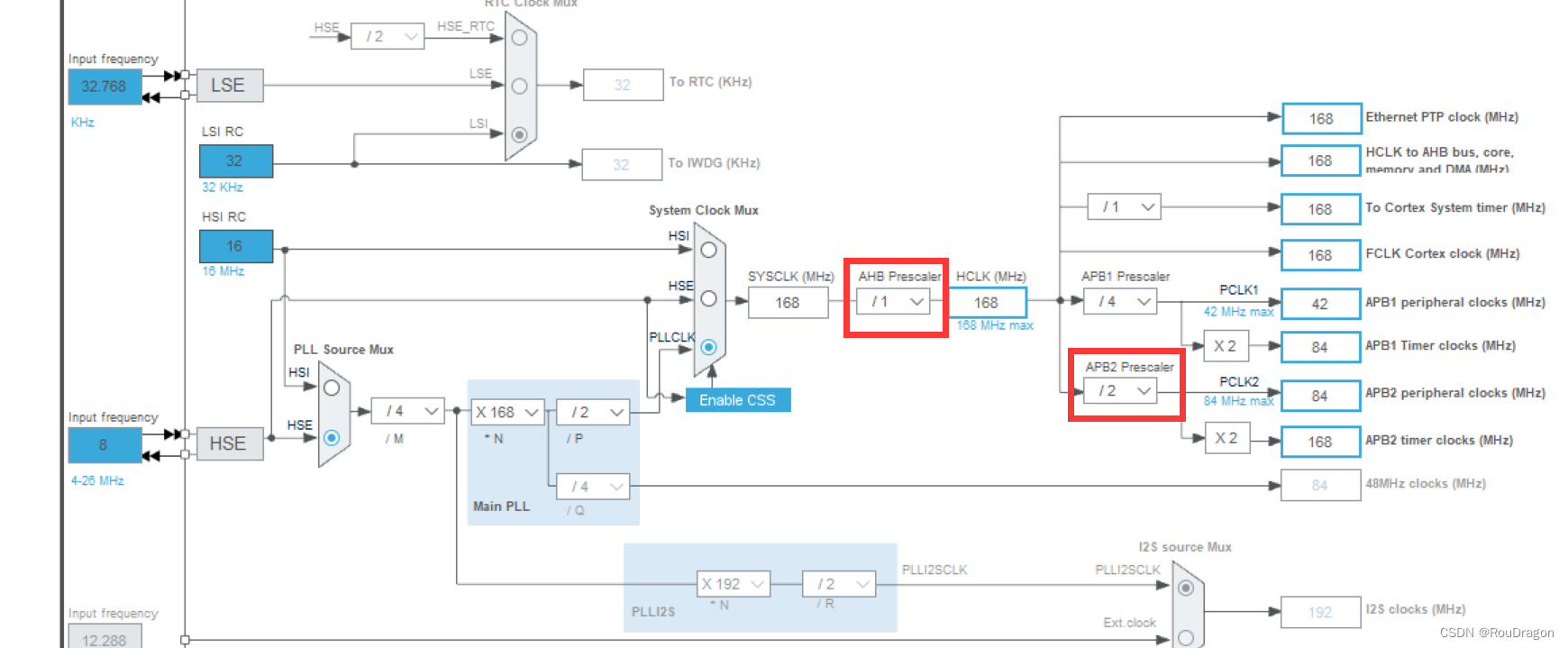
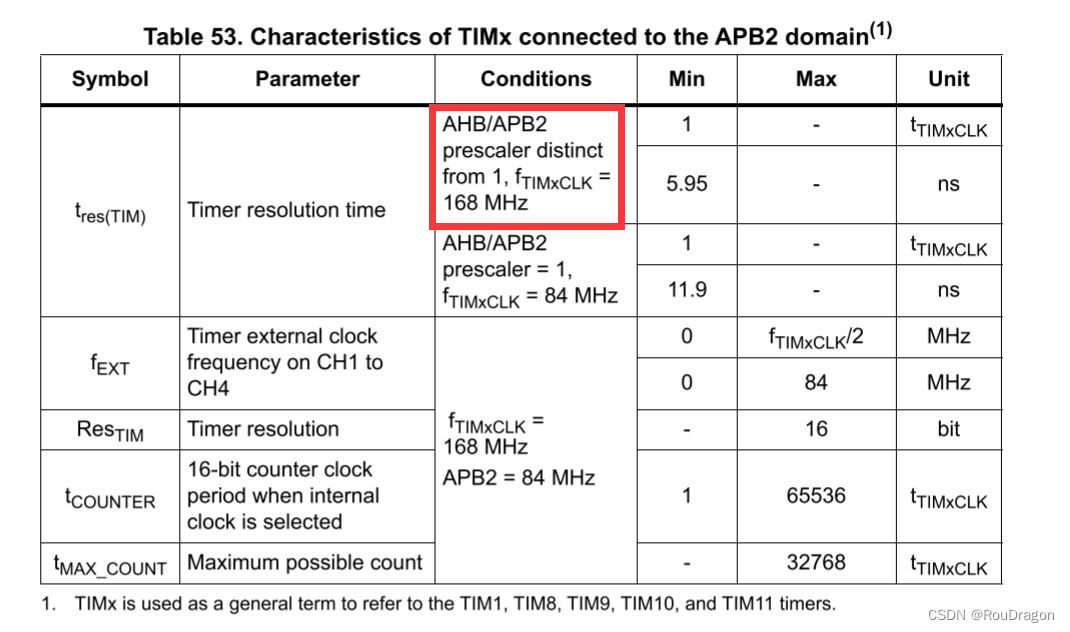
结合数据手册分析APB2配置时不等于1,定时器1可以配置成168MHZ。
4.本人配置的定时器1,4个通道都配置了但是只用了两个一个示波器观察,一个控制舵机
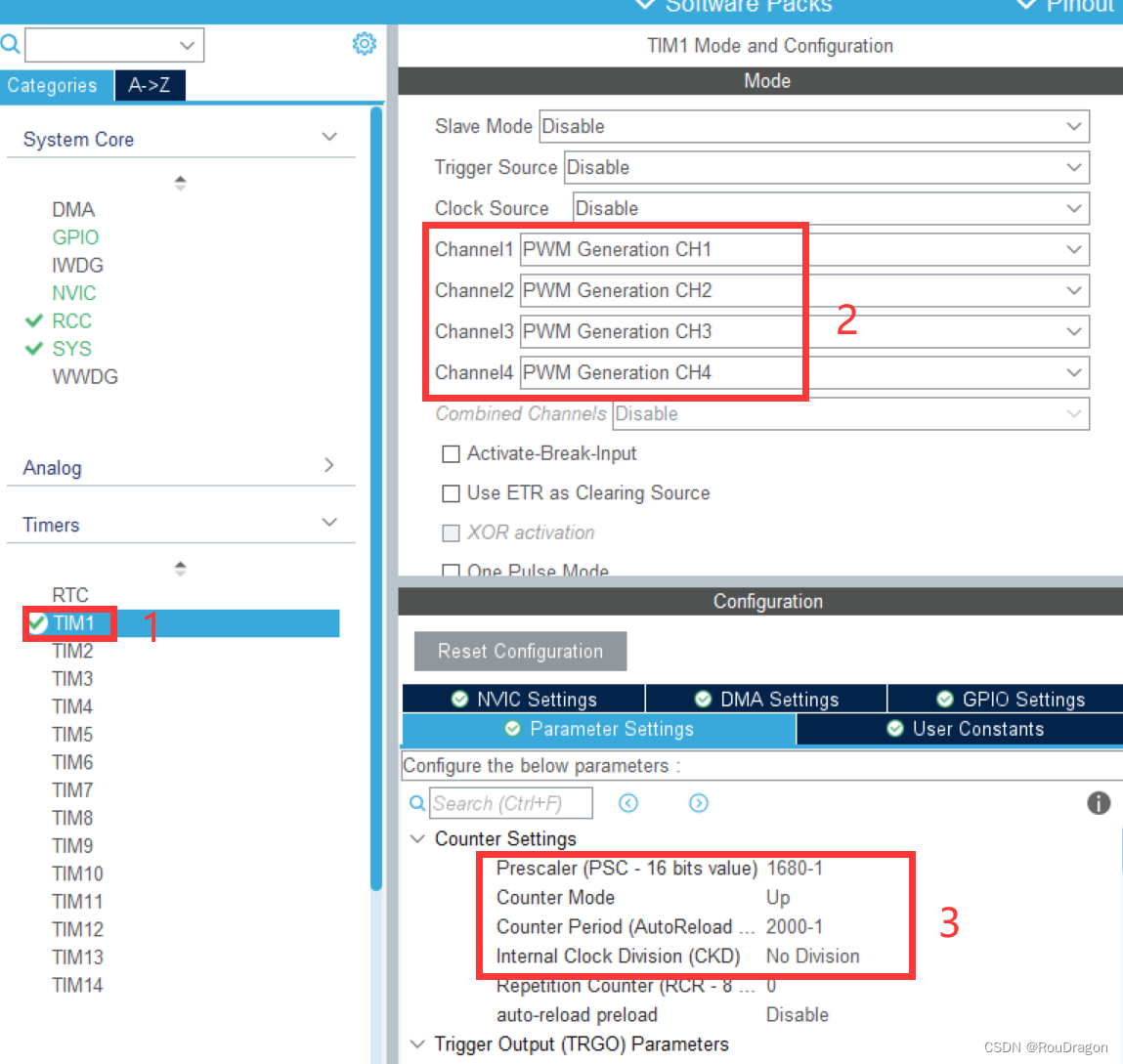 1680×2000÷(168×10^6)=0.02s=20ms这也是一次周期循环所要的时间。
1680×2000÷(168×10^6)=0.02s=20ms这也是一次周期循环所要的时间。
代码部分没有特别强调都是HAL库自动生成部分,主函数部分不同之处
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); //开启定时器1通道1
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_2);
//__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,1000);
//ServoCtrl(1,180);
ServoCtrl2(1,180,1); //通道1旋转角度180度以及速度设置为1
ServoCtrl2(2,180,1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
“servo.h”
#ifndef _SERVO_H
#define _SERVO_H
#include "tim.h"
void ServoCtrl(uint8_t Channel,uint8_t Servo_Angle);
void ServoCtrl2(uint8_t Channel,float Servo_Angle,short speed);
#endif
servo.h
#include "servo.h"
/*
此代码对应的ARR值必须为2000
ServoCtrl(uint8_t Channel,uint8_t Servo_Angle)是直接输入角度,会将角度计算成对应的PWM
ServoCtrl2(uint8_t Channel,float Servo_Angle,short speed) //可设置速度型speed越小速度越慢,最终输出值只会接近期望角度
*/
void ServoCtrl(uint8_t Channel,uint8_t Servo_Angle)
{
short angle_pwm;
angle_pwm=50+(float)Servo_Angle/180*200; //舵机角度PWM转换公式
switch(Channel)
{
case 1: //电机1正转
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,angle_pwm); //相当于一个周期内(20ms)有0.5ms高脉冲
break;
case 2:
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_2,angle_pwm); //相当于一个周期内(20ms)有0.5ms高脉冲
break;
case 3:
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_3,angle_pwm); //相当于一个周期内(20ms)有0.5ms高脉冲
break;
case 4:
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,angle_pwm); //相当于一个周期内(20ms)有0.5ms高脉冲
break;
}
}
void ServoCtrl2(uint8_t Channel,float Servo_Angle,short speed) //可设置速度型
{
float angle_pwm=0;
angle_pwm = 50+(Servo_Angle*200/180);
for(short i=0;i<angle_pwm;i+=speed)
{
if (Channel==1) __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,i); //相当于一个周期内(20ms)有0.5ms高脉冲
else if(Channel==2) __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_2,i); //相当于一个周期内(20ms)有0.5ms高脉冲
else if(Channel==3) __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_3,i); //相当于一个周期内(20ms)有0.5ms高脉冲
else if(Channel==4) __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,i); //相当于一个周期内(20ms)有0.5ms高脉冲
HAL_Delay(15);
}
}
具体对定时器的讲解请参考第四篇文章
https://blog.csdn.net/weixin_52531699/article/details/135422167?spm=1001.2014.3001.5502
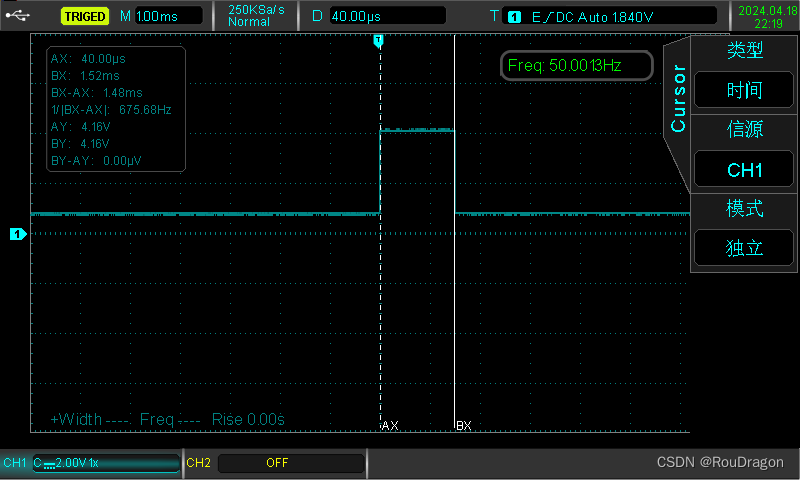
测试效果
当角度对应90度时,频率(Freq)=50HZ,脉宽1.5ms,脉宽时间是指BX-AX
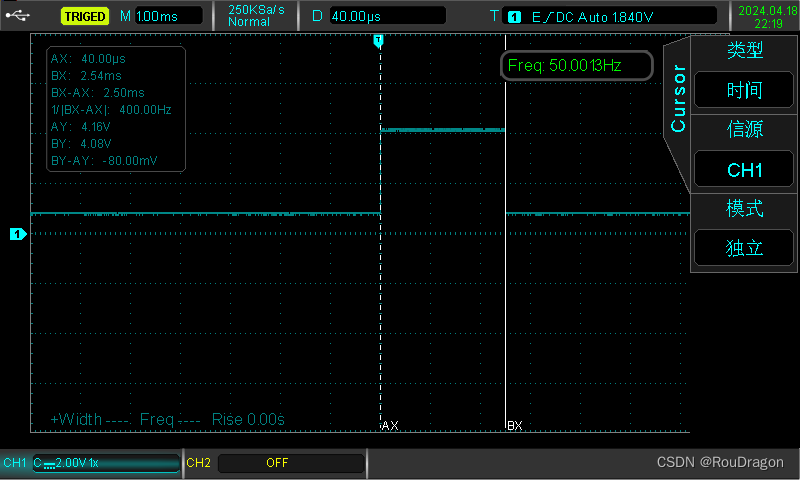
当角度对应180度时,频率(Freq)=50HZ,脉宽2.5ms,脉宽时间是指BX-AX
设定速度控制舵机摆动时
舵机旋转180度视频
设定速度控制舵机摆动时,PWM脉宽变化
PWM脉宽调整
程序参考链接:
链接:https://pan.baidu.com/s/1_wzTriIyBBN3qhw2BB72YA?pwd=zre2
提取码:zre2
–来自百度网盘的分享